

 Spring is here! The clocks sprung forward recently, the weather is changing (let’s pretend), and March Madness is underway. It’s definitely “that” time of year, so let’s talk about the mechanics of a fascinatingly simple thing that seems to defy logic.
Spring is here! The clocks sprung forward recently, the weather is changing (let’s pretend), and March Madness is underway. It’s definitely “that” time of year, so let’s talk about the mechanics of a fascinatingly simple thing that seems to defy logic.
And, no, we’re not talking about how our brains feel after losing that hour of sleep or the Wisconsin upset busting our brackets. We’re referring to a literal spring that can be deformed by a force and then return to its original shape after the force is removed. It’s pretty incredible when you think about it!
What is a spring?
Springs come in a huge variety of different forms, but the simple metal coil spring is probably the most familiar. Springs are an essential part of almost all moderately complex mechanical devices; from ball-point pens to racing car engines.
There is nothing particularly magical about the shape of a coil spring that makes it behave like a spring. The ‘springiness’, or more correctly, the elasticity is a fundamental property of the wire that the spring is made from. A long straight metal wire also has the ability to ‘spring back’ following a stretching or twisting action. Winding the wire into a spring just allows us to exploit the properties of a long piece of wire in a small space. This is much more convenient for building mechanical devices.
What happens when a material is deformed?
When a force is placed on a material, the material stretches or compresses in response to the force. We are all familiar with materials like rubber which stretch very easily. In mechanics, the force applied per unit area is what is important, this is called the stress (symbol σ). The extent of the stretching/compression produced as the material responds to stress in called the strain (symbol ϵ). Strain is measured by the ratio of the difference in length ΔL to original length L0 along the direction of the stress, i.e. ϵ=ΔL/L0.
Every material responds differently to stress and the details of the response are important to engineers who must select materials for their structures and machines that behave predictably under expected stresses. For most materials, the strain experienced when a small stress is applied depends on the tightness of the chemical bonds within the material. The stiffness of the material is directly related to the chemical structure of the material and the type of chemical bonds present. What happens when the stress is removed depends on how far the atoms have been moved. There are broadly two types of deformation:
- Elastic deformation. When the stress is removed the material returns to the dimension it had before the load was applied. The deformation is reversible, non-permanent.
- Plastic deformation. This occurs when a large stress is applied to a material. The stress is so large that when removed, the material does not spring back to its previous dimension. There is a permanent, irreversible deformation. The minimal value of the stress which produces plastic deformation is known as the elastic limit for the material.
Any spring should be designed and specified such that it only ever experiences elastic deformation when built into a machine under normal operation.
Hooke’s Law
When studying springs and elasticity, the 17ᵗʰ century physicist Robert Hooke noticed that the stress vs strain curve for many materials has a linear region. Within certain limits, the force required to stretch an elastic object such as a metal spring is directly proportional to the extension of the spring. This is known as Hooke’s Law and commonly written:
 Where F is the force, x is the length of extension/compression and k is a constant of proportionality known as the spring constant which is usually given in N/m.
Where F is the force, x is the length of extension/compression and k is a constant of proportionality known as the spring constant which is usually given in N/m.
Though we have not explicitly established the direction of the force here, the negative sign is customarily added. This is to signify that the restoring force due to the spring is in the opposite direction to the force which caused the displacement. Pulling down on a spring will cause an extension of the spring downward, which will in turn result in an upward force due to the spring.
It is always important to make sure that the direction of the restoring force is specified consistently when approaching mechanics problems involving elasticity. For simple problems we can often interpret the extension x as a 1-dimensional vector; in this case the resulting force will also be a 1-dimensional vector and the negative sign in Hooke’s Law will give the correct direction of the force.
When calculating x, it is important to remember that the spring itself will also have some nominal length L0. The total length L of a spring under extension is equal to the nominal length plus the extension, L=L0 + x. For a spring under compression, it would be L= L0 – x.
Young’s Modulus and Combining Springs
Young’s modulus (also known as the elastic modulus) is a number that measures the resistance of a material to being elastically deformed. It is named after the 17ᵗʰ century physicist Thomas Young. The stiffer a material, the higher its Young’s modulus.
Young’s modulus is usually given the symbol E and is defined as:
Young’s modulus can be defined at any strain, but where Hooke’s Law is obeyed it is a constant. We can directly obtain the spring constant k from the Young’s modulus of the material, the area A over which the force is applied (since stress depends on the area) and nominal length of the material L.
This is a very useful relationship to understand when thinking about the properties of combinations of springs. Consider the case of two similar ideal springs with spring constant k which can be arranged to support a 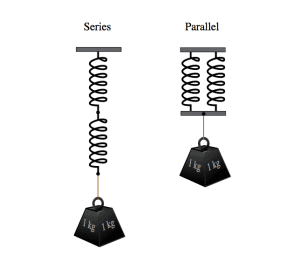 weight end-to-end (series) or jointly (parallel) as shown in the image to the right. What is the effective spring constant for the combination in each case?
weight end-to-end (series) or jointly (parallel) as shown in the image to the right. What is the effective spring constant for the combination in each case?
In the series configuration, we can see that the combined spring is equivalent to one spring with double the length. The spring constant in this case must therefore be half that of an individual spring, keffective=k/2.
In the parallel configuration, the length remains the same but the force is distributed over twice the area of material. This doubles the effective spring constant of the combination, keffective=2k.
Spring Ahead
It’s truly fascinating to think about the science behind a spring. It is almost as if Mother Nature decided that she couldn’t limit the word to just a season. It’s literally a force of nature!
And then some,
Your Friends @ OBP
NOTE: All Khan Academy content is available for free at www.khanacademy.org. This article can be found in its entirety here.
Recent Comments